Tecnologia Científica
Sentir é crer: Mão biônica 'sabe' o que está tocando e agarra como um humano
A mão protética pioneira se adapta e ajusta cuidadosamente sua pegada para evitar danos ou manuseio incorreto do que quer que esteja segurando
Por
Roberto Molar Candanosa - 14/03/2025


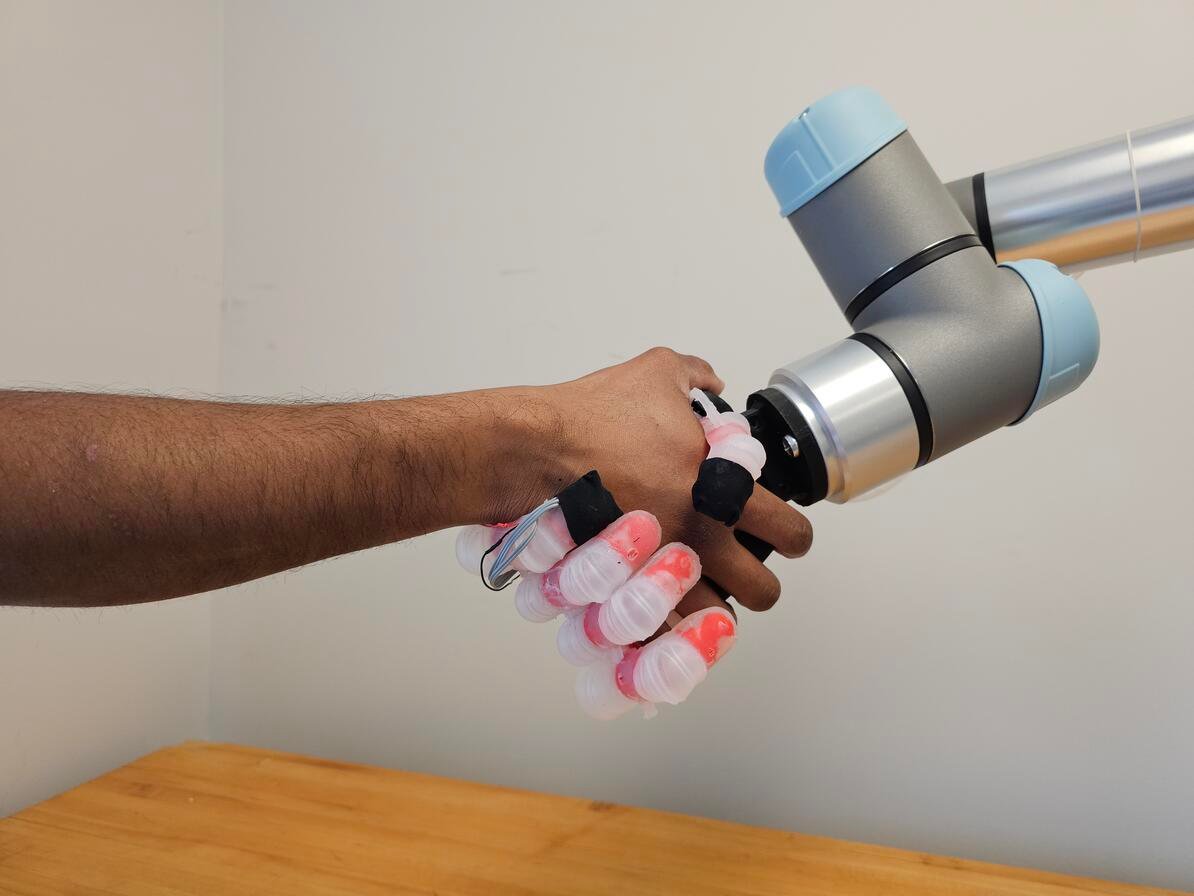
Crédito: Sriramana Sankar/Universidade Johns Hopkins.
Engenheiros da Universidade Johns Hopkins desenvolveram uma mão protética pioneira que pode segurar brinquedos de pelúcia, garrafas de água e outros objetos do cotidiano como um ser humano, adaptando e ajustando cuidadosamente sua pegada para evitar danos ou manuseio incorreto do que estiver segurando.
O design híbrido do sistema é o primeiro para mãos robóticas, que normalmente são muito rígidas ou muito macias para replicar o toque humano ao manusear objetos de texturas e materiais variados. A inovação oferece uma solução promissora para pessoas com perda de mão e pode melhorar a forma como os braços robóticos interagem com seu ambiente.
Detalhes sobre o dispositivo aparecem na quarta-feira (05) na Science Advances.
"O objetivo desde o início foi criar uma mão protética que modelássemos com base nas capacidades físicas e sensoriais da mão humana — uma prótese mais natural que funcionasse e parecesse um membro perdido", disse Sriramana Sankar , um aluno de doutorado em engenharia biomédica da Johns Hopkins que liderou o trabalho. "Queremos dar às pessoas com perda de membro superior a capacidade de interagir com segurança e liberdade com seu ambiente, sentir e segurar seus entes queridos sem se preocupar em machucá-los."
O dispositivo, desenvolvido pelo mesmo Laboratório de Neuroengenharia e Instrumentação Biomédica que em 2018 criou a primeira "pele" eletrônica do mundo com uma sensação de dor semelhante à humana, apresenta um sistema multidedos com polímeros semelhantes a borracha e um esqueleto interno rígido impresso em 3D. Suas três camadas de sensores táteis, inspiradas nas camadas da pele humana, permitem que ele agarre e distinga objetos de vários formatos e texturas de superfície, em vez de apenas detectar o toque. Cada uma de suas articulações macias dos dedos cheias de ar pode ser controlada com os músculos do antebraço, e algoritmos de aprendizado de máquina focam os sinais dos receptores de toque artificiais para criar uma sensação de toque realista, disse Sankar.
"A informação sensorial de seus dedos é traduzida para a linguagem dos nervos para fornecer feedback sensorial naturalista por meio de estimulação elétrica nervosa", disse Sankar.
No laboratório, a mão identificou e manipulou 15 objetos cotidianos, incluindo brinquedos de pelúcia delicados, esponjas de prato e caixas de papelão, bem como abacaxis, garrafas de água de metal e outros itens mais resistentes. Nos experimentos, o dispositivo obteve o melhor desempenho em comparação com as alternativas, manuseando objetos com sucesso com 99,69% de precisão e ajustando sua pegada conforme necessário para evitar contratempos. O melhor exemplo foi quando ele pegou agilmente um copo de plástico fino e frágil cheio de água, usando apenas três dedos sem amassá-lo.
"Estamos combinando os pontos fortes da robótica rígida e macia para imitar a mão humana", disse Sankar. "A mão humana não é completamente rígida ou puramente macia — é um sistema híbrido, com ossos, articulações macias e tecidos trabalhando juntos. É isso que queremos que nossa mão protética alcance. Este é um novo território para robótica e próteses, que não adotaram totalmente essa tecnologia híbrida antes. É ser capaz de dar um aperto de mão firme ou pegar um objeto macio sem medo de esmagá-lo."
Para ajudar os amputados a recuperar a capacidade de sentir objetos enquanto os agarram, as próteses precisarão de três componentes principais: sensores para detectar o ambiente, um sistema para traduzir esses dados em sinais semelhantes aos dos nervos e uma maneira de estimular os nervos para que a pessoa possa sentir a sensação, disse Nitish Thakor , professor de engenharia biomédica da Johns Hopkins que dirigiu o trabalho.
"O objetivo desde o início foi criar uma prótese de mão que modelássemos com base nas capacidades físicas e sensoriais da mão humana — uma prótese mais natural que funcionasse e parecesse um membro perdido."
Sriramana Sankar
Estudante de doutorado, Engenharia biomédica
A tecnologia bioinspirada permite que a mão funcione dessa forma, usando sinais musculares do antebraço, como a maioria das próteses de mão. Esses sinais conectam o cérebro e os nervos, permitindo que a mão flexione, solte ou reaja com base em seu sentido de tato. O resultado é uma mão robótica que intuitivamente "sabe" o que está tocando, muito parecido com o que o sistema nervoso faz, disse Thakor.
"Se você está segurando uma xícara de café, como sabe que está prestes a deixá-la cair? A palma da mão e as pontas dos dedos enviam sinais ao cérebro de que a xícara está escorregando", disse Thakor. "Nosso sistema é inspirado neuralmente — ele modela os receptores de toque da mão para produzir mensagens semelhantes a nervos, de modo que o 'cérebro' da prótese, ou seu computador, entenda se algo está quente ou frio, macio ou duro, ou escorregando da pegada."
Embora a pesquisa seja um avanço inicial para a tecnologia robótica híbrida que pode transformar tanto as próteses quanto a robótica, mais trabalho é necessário para refinar o sistema, disse Thakor. Melhorias futuras podem incluir forças de preensão mais fortes, sensores adicionais e materiais de nível industrial.
"Essa destreza híbrida não é essencial apenas para próteses de próxima geração", disse Thakor. "É o que as mãos robóticas do futuro precisam porque elas não estarão apenas manuseando objetos grandes e pesados. Elas precisarão trabalhar com materiais delicados como vidro, tecido ou brinquedos macios. É por isso que um robô híbrido, projetado como a mão humana, é tão valioso — ele combina estruturas macias e rígidas, assim como nossa pele, tecido e ossos."
Principais conclusões
Engenheiros biomédicos da Johns Hopkins criaram uma mão protética que pode segurar objetos com precisão quase humana.
Diferentemente das mãos robóticas tradicionais, esta mão bioinspirada combina materiais rígidos e macios, juntamente com três camadas de sensores táteis, para imitar o toque real.
Controlada pelos músculos do antebraço e pelo aprendizado de máquina, a mão manipulou com sucesso 15 objetos do cotidiano.
Outros autores incluem Wen-Yu Cheng, da Florida Atlantic University; Jinghua Zhang, Ariel Slepyan, Mark M. Iskarous, Rebecca J. Greene, Rene DeBrabander e Junjun Chen, da Johns Hopkins; e Arnav Gupta, da University of Illinois Chicago.
Esta pesquisa foi financiada pela bolsa "Feedback Neuromórfico: Uma Estratégia para Melhorar a Incorporação e o Desempenho da Prótese" do Departamento de Defesa por meio do Programa de Pesquisa de Resultados de Órteses e Próteses (W81XWH2010842) e da National Science Foundation.